Equivalence method for the braking effect on the swimming simulator and the specific pool conditions
Luciela VASILE, Monica STĂNESCU
National University of Physical Education and Sport Bucharest, 140 Constantin Noica St., Romania
lucielav05@yahoo.com, monica_iulia@yahoo.com
Daniela SCHOR, Vladimir SCHOR
SC Medisport, 824B Pădurii St., Copăceni, Ilfov
schor@yahoo.com, vschor@medisport.ro
Virgil TEODORESCU
National University of Physical Education and Sport Bucharest, 140 Constantin Noica St., Romania
ana_trade2004@yahoo.com
Abstract: Simulator training for swimmers is a well established practice by now. The increasingly valuable results are based on the progress of the athletes following the simulator training. The literature presents a range of training objectives and methodical instructions on its use in various stages of preparation. In terms of methodology, focus shifted on the integration of the simulator training in a training plan for swimmers designed to improve the active phase of the motion. This paper aims to achieve this objective by finding simulator load steps that are similar to the resistance to motion in water, corresponding to the different means of training. The advantage of this approach is that the simulator allows very detailed analytical measurements that cannot be performed in the natural environment. These measurements can point out the swimmers’ movement stereotypes characterizing the active phase of the motion in the water – the propulsion. In order to conduct the study, a WEBA Swim model was used. The device belongs to the Performer Club Bucharest. The method depicted in this paper allows the identification of an equivalence coefficient of the strain on the simulator, comparable to the strain in water, and it consists in going through successive stages of practice and evaluating the effect of strain on the motion’s structure. This equivalence allows the identification of the propulsion structure on the simulator, and the error correction in the motor execution, with a high rate of transfer in the implementation in the water. Based on the information obtained the training strain can be programmed depending on the preparation period of the athletes, and thus a better match with the competition effort can be secured.
Keywords: swimming; simulator; training methodology
I. INTRODUCTION
The literature highlights a series of studies aimed at developing motion models that are specific for dry land simulated swimming [1], the analysis of the movement control during various swimming processes [2] [3], models of the training of the cadet athletes, integrating work on the simulator. [4] [5] These studies are emphasizing the role that various mechatronic systems could play in preparing swimmers and, at the same time, on how technology can put conditions on the progress and performance of the athletes. However, strictly related to the analysis of the arms movements, just a few musculo-skeletal analysis for human swimming took place, since the external force acting on the whole body as the input to the musculo-skeletal model was difficult to measure or estimate. [6]
The methodology of ergometer work aimed at preparing swimmers has developed over the years, based on the results obtained in training and competitions. This was the reason why various producers offered to coaches simulators in order to accompany swimming with the means of specialized dry land training. In most cases the producers of such devices do not provide data on the dynamics of the simulator, nor indications related to the equivalence of work in water and dry land. This greatly limits the range of use of the ergometer. Thus, we are faced with the problem of finding solutions that coaches can apply relatively easy, to allow the dosage of the effort parameters on simulator, at a level comparable to that of the water. To fully benefit from the advantages of training ashore with simulators providing physical conditions similar to those of water, a number of requirements must be fulfilled in terms of the structure of the movement, loading dynamic in real environment and the possibility of varying the load so as to obtain braking conditions and to facilitate movement; real-time information of the subject on the characteristics of the movement. [7] [8] [9] Among these requirements, the one regarding the loading has no technical specifications supplied by producers.
Under these circumstances, we intend to compensate this absence by using a procedure of "black box" type to identify the braking behavior of the device, regardless of the manufacturer‘s specifications.
1.1 On land computer assistance for swimmers
Ergometers are based on biological models, biomechanical studies that take into account the external forces acting on the swimmer – the force of the fluid (hydrodynamic resistance), gravity (buoyancy), other inertial forces (braking force). Having the biomechanical modeling as baseline, these computerized systems can be used for precise simulation of training or competitions.
The optimal intrication of the two forms of training for swimmers, in water and on land, ensure the installation of a functional link between somatognosia and motricity. In this context, somatognosia – the mental construction where the integrative results of the feedbacks on body image are settled, of the segments and their place in space - is tributary to movement.
The combination of new digital technologies in the preparation of swimmers can offer additional advantages:
- real-time information needed to identify the correct movement pattern. If on the simulator the efforts correspond to those in the water, the shape of the power wave that appears on the ergometer display should be similar to that in water;
- providing graphic schemes on the integrated pattern of force / velocity / amplitude practiced in water, as expressions of the models in which the fast and powerful movement is not affected in terms of amplitude;
- development of sensations and perceptions that are able to correlate and provide a positive transfer of elements practiced on land in the aquatic environment;
- adaptation of motor performance to visual information provided by the computer connected to the simulator and of the verbal instructions given by the trainer. This capacity is expressed in the ability of the swimmers to operate a connection of the terrestrial and the fluid environment. [10] [11]
Based on these theoretical and practical premises, we believe that water training must be permanently accompanied by on land training. Dry land training can be sustained, controlled, and especially analyzed in real time using technological means of information and virtual communication.
The equipment based on such technology is accurately modeling water motion, causing lasting effects, mainly represented by refining muscle control, but also by increase of propulsive force during strokes, improving their efficiency, strength in each arm, on every move.
1.2 Weba Swim Ergometer
The Weba Swim Ergometer is a brand product which gives athletes the best opportunity to accurately simulate the swimming motion for both testing and training. The complexity of the smooth and gentle motions can increase muscular strength as well as flexibility of the upper body, and offers optimal cardiovascular training.
Using a mechatronic system in the swimmers’ training, a digital language, such as the one used by us, has the following advantages:
- ensuring prompt extrinsic messages through real-time tracking of important phases of themovement. Thus, reconsidering the motor structures by graphic-vector reading deepens the understanding of each gesture or motion;
- precise measurements of range of motion and progress in this regard. A fast, accelerated, and large stroke is seen as efficient. The growth rate of execution should not alter negatively the amplitude of arm movements;
- knowledge and assimilation (understanding) of strokes, namely the invisible phases in the water;
- elaboration of reports obtained upon completion of stroke suites that provide information about how the pattern of strokes changes due to fatigue;
- gradual transition to complex coordinative tasks, based on feedback, but also on feedbefore;
- visualization on display of the movement shape and the precise form of "leadership" of the segments. There are analyses concerning the dynamics of motric structures. We believe that sculling strokes are complex actions, difficult to undergo the filter of analytical thinking. For example, it is difficult to technically integrate maintainance of the elbow in a high position compared to the rest of the arm in motion. Counsilman encouraged his swimmers to use the propeller-like sculling stroke, in which the elbow is raised to a higher position and the arm moves inward and outward in an S-shaped, propeller-like pattern [9];
- independent evaluation of the arm movements;
- elaborate repeatable sets in standard conditions;
- providing detailed information of hodometric and dynamometric nature.
II. RESEARCH DESIGN
2.1 Purpose of the study and the hypothesis
This paper’s aim is to find the simulator load steps that are similar to the resistance to motion in water, corresponding to the different means of training. The advantage of this approach is that the simulator allows very detailed analytic measurements that cannot be performed in the natural environment. These measurements can point out the swimmers‘ movement stereotypes characterizing the active phase of the motion in the water - the propulsion.
The objectives of this paper are:
- intensive and precise retro-information of the athlete, as well as the coach information on the adaptation, correction or improvement of the stroke movements, in all coordinates;
- building a dry land methodology of simulator training for swimmers, in order to obtain a better coordination and propulsive phases and an improved force of strokes, verifiable targets by computer recorded parameters, but also by improving performance in 50 m butterfly arms test.
The research hypothesis is that proper management of spatio-temporal and dynamic-energy distributions of water movement can be improved in terms of perception and quality by using simulator conditions, at the level of kinesthetic sub-system, and at muscle level, through adequate regulation of specific efforts that are specific for swimming competitions.
2.2. Methods and subjects
Conditions that are based on the correct transfer of motion from an unstable environment, water, in a stable one - terrestrial environment, and vice versa, are the foundation of our experimental study. We were particularly concerned with the stroke technique of cadet swimmers, and modeling their effort by "shaping" tableaus of force / power / amplitude specific for swimming competitions.
For this purpose, we used the following methods:
- documentation, by studying specialized papers on issues regarding simulation training;
- experimental method, by applying the independent variable on the group of swimmers. The
independent variable was set in progressive adjustment of stroke tensions that would find a positive
correlation with those developed in specific training;
- statistical and mathematical method, which provided information on the evolution of results
of the swimmers in 50 m butterfly arms;
- iconography - graphical representation of the results achieved.
The experimental group consisted of eight swimmers, aged between 13 - 15 years. They participated for 4 months in a training program in which the simulator sessions frequency was 1 lesson/week.
2.3. Equivalence methodology for the braking effect
In order to identify the characteristics of the system and determine the equivalence method, we analyzed the input - output relationship, i.e. the simulator settings and performance of the athletes. For this, the following steps were followed:
- completion of three races: 50 m butterfly arms strokes, 50 m butterfly pulls with palm gears, 50 m butterfly drags with palm gears and floaters, by athletes and recording the time obtained;
- covering the distance of 50 m butterfly pulls by athletes, in three successive races, one for each loading phase – with minimum braking, average and maximum braking; time was recorded for each race;
- the patterns of movement were recorded for the right hand and the left hand, in each of the three loading situations;
- the results obtained in water were analyzed and compared with those obtained on the simulator, at various phases of loading.
Subsequent to establishing the equivalence between work in water and on land, we proceededto the use of the simulator, once a week, during a 60 minute lesson.
The exercises included in the training program on land, were designed to observe the motor structure of strokes in the butterfly test and of the metabolic stress regime applied to these butterfly drags tests practiced by these cadet swimmers.
On land they practiced the same kind of sets during the entire testing period, of 8 x 50 m butterfly pulls. The aim was permanent propulsion control, stabilization of a correct rhythm of strokes by optimizing motor actions and improving the race time. Also, the simulator was calibrated and recalibrated to adjust the motor program, in order to overlap the stroke phases of the right arm / left arm, but also for keeping in comfortable conditions the body alignment on the hydro-simulation device.
III. RESULTS
The analysis of the results was performed for each athlete by comparing the times in the water and on land. To illustrate the application of the equivalent method of the braking effect we are showing data obtained from an athlete (S1).
Following the records of the first lesson on the simulator, it was found that the times obtained at each of the three load steps (table 1) are much better than those in the pool (table 2). The biggest loading step allows the athlete to achieve results closer to those of the test held in pool (50 m butterfly arms strokes). Similar results were reported for other athletes too.
| Braking Type | F1 (minimum brake) | F2 (average brake) | F3 (maximum brake) |
| On land time (sec) | 18.14 | 19.27 | 23.66 |
Table 1. The value of time obtained by S1 during work in the simulator (50 m butterfly arms
strokes) under different braking conditions
| Type of exercise | 50 m butterfly arms stroke strokes | 50 m butterfly arms stroke with palm gear | 50 m butterfly arms stroke with palm gear and floaters |
| Water time (sec) | 33.8 | 34.90 | 35.02 |
Table 2. The value of times obtained by S1, in work in water, 50 m for different processes
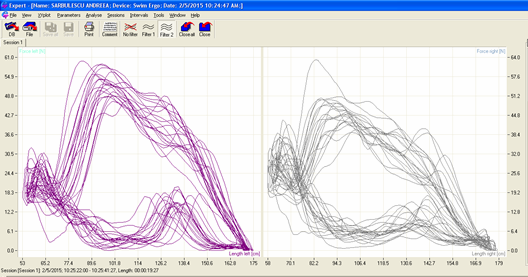
We have an example associated with these results in the overlapping graphs for the right hand and the left hand, representing the propulsion force, depending on the position of the arm in the active phase of the movement, for S1. (Figure 1, Figure 2) If we examine the pattern generating the force in the active side of the movement on the device, at an increased load (figure 2), we see:
- increasing disorganization of the pattern with the increasing of the load;
- increasing asymmetry between the right hand patterns and the patterns of the left hand.
Therefore, in the case of the respective athlete, we expect the disorganization of the movement to be even more significant when working in water.

Figure 1. Graphs of the propelling force, minimum braking
In corpora, athletes claim there are higher demands on land tests compared to the water test, despite lesser load of the test on the device than in the basin. This can be attributed to the fact that the device does not allow controlling the thrust by the athletes, forcing him to exert force over the entire length of movement. The only possibility to lighten the effort is shortening the length of the movement. As this is not allowed, due to the coach indications, the athletes are forced to practice correctly (see on graphs the relatively equal length of the movement).
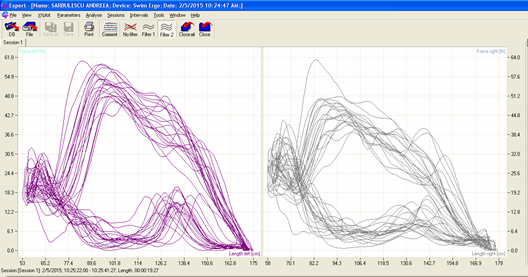
Figure 2. Graphs of the propelling force, maximum braking
Because the device does not allow the athlete to modify during the propulsion the arm angle of inclination – the arm attack angle, it compels the correlation of the arm movement in the water with the need for overcoming the resistance of the device. In water, this can be avoided because it is possible to move the arm through water without exerting a propulsion force and, if tired, it is likely to use this subterfuge. We can say, however, that the main benefit of this device is linked to the induction of a correct pattern transferable in pool, and the opportunity to influence resistively the motion control, in agreement with literature data. [11]
After identifying the loading phase that provides the closest working conditions in water, we continued the preparation of athletes. The results of the subjects were recorded in two stages, in water, in the 50 m butterfly arms test.
-In October 2014 (t0) when the athletes were at the beginning of the simulator aided
preparation;
-In January 2015 (t1), after four months of simulator training (16 lessons).
The results of the athletes, during the two moments of testing, are shown in Tables 3 and 4. In the case of the 50 m test, the application of the test of significance of difference between environments revealed significant statistic improvements at p = 0.05, as may be noticed in Table 3, between the first 2 tests (t = 2.80). This demonstrates that the training methodology, which integrated work on the simulator, to a maximum load, was correct and contributed to increasing the performance of athletes.
| Subject (S) | October t0 | January t1 |
| S1 | 33.8 | 31.7 |
| S2 | 34.2 | 33.1 |
| S3 | 35.2 | 34.3 |
| S4 | 33.4 | 32.5 |
| S5 | 32.6 | 33.6 |
| S6 | 34.2 | 32.9 |
| S7 | 33.2 | 30.2 |
| S8 | 33.9 | 33.1 |
| t |
| 2.80 |
| Sig. |
| 0.02 |
Table 3. 50 m butterfly arms strokes performances
IV. CONCLUSIONS
Simulation results indicate that it is possible to use inverse dynamics and static optimization for a full-body simulation with large accelerations and a large range of motion. [12] Even if, in an attempt to render the stroke more effective, we intervene only on the arms of the swimmers and even though there are many uncertainties regarding the correlation of the work tables – on land vs. water - the simulator can provide numerous parameters, precisely quantifiable and explainable.
Computerization of learning in this simulated form can highlight the stroke errors, but more importantly, can balance the intrinsic feedback that, that is often dull, undefined, gradually installing a more clear temporal, spatial and dynamic one. Over time, the pressure on water, single stroke, becomes strong, fast, and wide. The deep catch stroke is achieved, which is more effective and more efficient than the sculling stroke. [13]
In our study, the correlation of the two forms of training provided not only recording and interpretation of numerous parameters, but also the imaging reflection of simulated movements. They may be subject to adjustments based simply on these parameters, disjoint by the computer in a virtual manner. We note also that the simulator allowed a rapid and significant progress to our athletes after the first four months of training. Thus, we believe that the research hypothesis was confirmed. At the same time we indicated the WEBA SWIM limitations, given that it cannot brake movement at water values. The ideal means of land preparation should allow brakes at the level of the pool, as well as braking to a lower level in order to develop force in high speed mode and also higher loads in order to develop specific strength at a lower speed. Further studies are needed on the site of the training using a simulator in planning the training of the swimmer cadets, given that it may be subject – due to the possibilities for variation of the load – of different training objectives.
Reference Text and Citations
[1] Nakashima, M. et al., 2007. Development of a full-body musculo-skeletal simulator for swimming. Journal of
Fluid Science and Technology, 2(1), 56-67 (available online at http://www.jstage.jst.go.jp/browse/jfst/)
339
[2] Si, W., 2013. Realistic Simulation and Control of Human Swimming and Underwater Movement. Dissertation,
University of California, Los Angeles. Pag. 26-30
[3] Hollander, A.P., de Groot, G., van Ingen Schenau, G.J., Toussaint, H. M., de Best, H., Peeters, W., Meulemans, A.,
Schreurs, A. W., 1986. Measurement of active drag during crawl arm stroke swimming. Journal of Sports Sciences,
Volume 4, Issue 1. Pag. 21-30
[4] Vasile, L., Stanescu, M., 2013. Computer assisted learning in swimmers‘ training. Proceedings of The 9th
International Scientific Conference eLearning and software for Education, Bucharest, April 25-26
[5] Vasile, L., Stanescu, M., 2014. Computer modeling of junior swimmers’ training. Proceedings of The 10th
International Scientific Conference eLearning and software for Education, Bucharest, April 24-25
[6] Schor, V., Hillerin, P, Stupinenu, I, Dinescu, I, Feredean, A., 1993. Ergometru simulator. Brevet de inventie,
Buletinul Oficial al O.S.I.M
[7] Schor, V., 1983. Multifunctional modular ergometer for simulating the specific dynamics in swimming.
International Series on Sport Science. Biomechanics and Medicine in Swimming. Edited by P.A.Hollander,
P.A.Huijing and G.de Groot, Human Kinetics Publisher inc., vol 14
[8] Schor, V., Hillerin, P., Stupineanu, I., 1985. Basic principles in designing simulators for monitoring effort in top
performance sport. vol. Applications of biomechanics, Roland Ortengren edts.
[9] Hopkins, J., 2012. Paddle vs. propeller: Which competitive swimming stroke is superior? ScienceDaily, 19 June.
(available online at http://www.sciencedaily.com/releases/2012/06/120619230230.htm)
[10] Schor, V., Stupineanu, I., Hillerin, P., 1985. Andurance in swimming, analized from the standpoint of automatic
regulation theory. Interntional series on sport science, vol. 14, Biomechanics and Medicine in Swimming, Edited by
P. A.Hollander, P.A.Huijing and G.de Groot, Human Kinetics Publisher inc. Pag.108-112
[11] Stupineanu, I., Schor, V., Hillerin, P., 1985. Learning of the motor action regulations through biofeedback in sports
activity. vol Applied cybernetics, Acad. P.H., Bucharest
[12] Holmberg, L.J., Lund, A.M., 2008. A musculoskeletal full-body simulation of cross-country skiing. Proceedings of
the Institution of Mechanical Engineers, Part P: Journal of Sports Engineering and Technology, 222(1). Pag.11-
22.
[13] Loebbecke, A., Mittal, R., 2012. Comparative Analysis of Thrust Production for Distinct Arm-Pull Styles in
Competitive Swimming. Journal Biomechanical Engineering, vol. 134. Pag.7